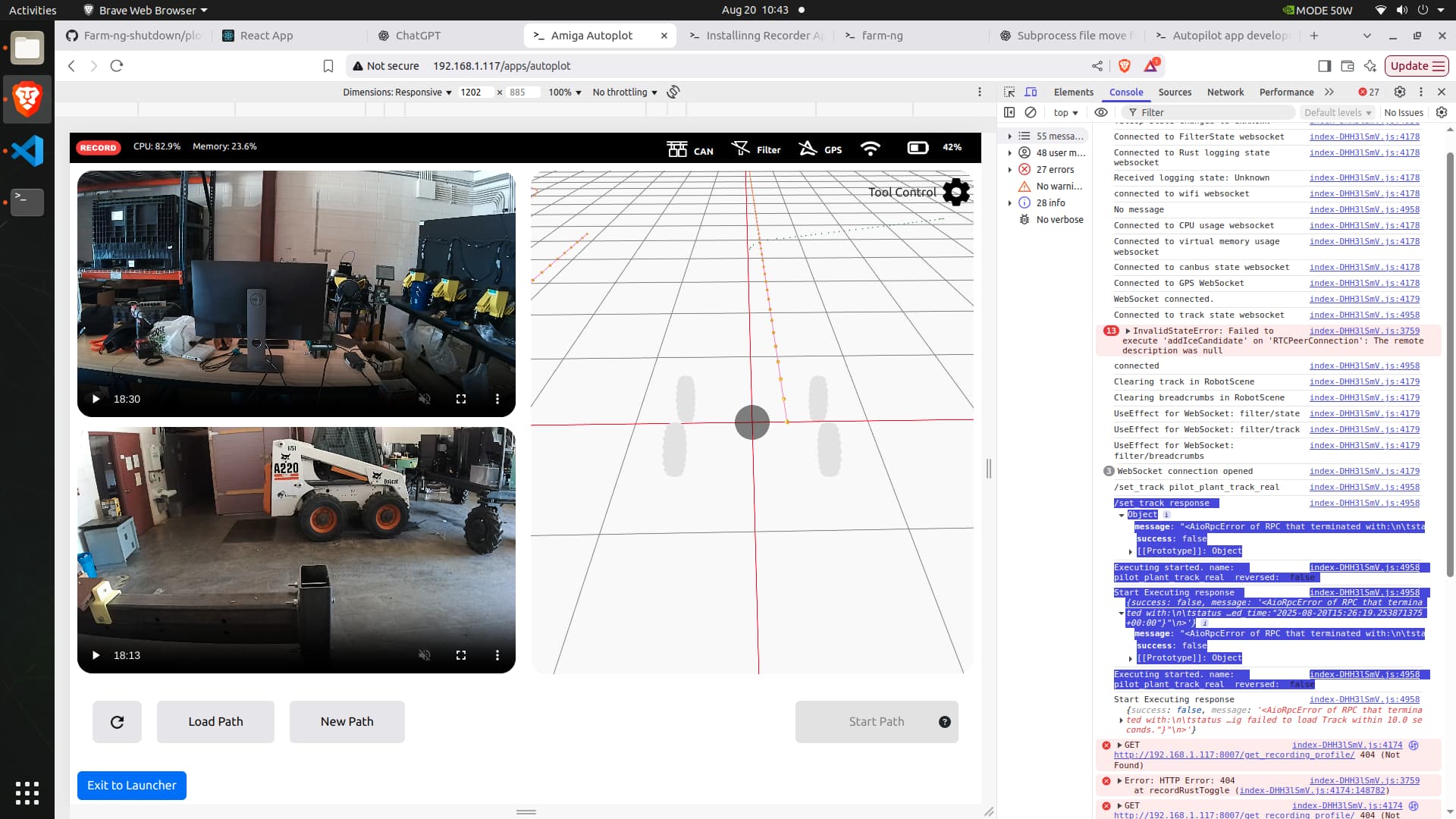
I’ve been working on creating tracks using the example code provided. The generated JSON file appears to be correct and aligns with the sample available on the Farm-ng website. The track also displays correctly when loaded in the AutoPlot app. However, the platform does not begin to move as expected. Upon investigating the issue, I found that the application is reporting the following error. How can I resolve this issue?
/set_track response
-
Object
-
message: “<AioRpcError of RPC that terminated with:\n\tstatus = StatusCode.UNKNOWN\n\tdetails = \“Unexpected <class ‘TimeoutError’>: TrackConfig failed to load Track within 10.0 seconds.\”\n\tdebug_error_string = \“UNKNOWN:Error received from peer {grpc_message:\“Unexpected <class \\‘TimeoutError\\’>: TrackConfig failed to load Track within 10.0 seconds.\”, grpc_status:2, created_time:\“2025-08-20T15:24:23.055788119+00:00\”}\”\n>”
-
success: false
-
Start Executing response
-
{success: false, message: ‘<AioRpcError of RPC that terminated with:\n\tstatus …ed_time:“2025-08-20T15:26:19.253871375+00:00”}"\n>’}
-
message: “<AioRpcError of RPC that terminated with:\n\tstatus = StatusCode.UNKNOWN\n\tdetails = \“Unexpected <class ‘TimeoutError’>: TrackConfig failed to load Track within 10.0 seconds.\”\n\tdebug_error_string = \“UNKNOWN:Error received from peer {grpc_message:\“Unexpected <class \\‘TimeoutError\\’>: TrackConfig failed to load Track within 10.0 seconds.\”, grpc_status:2, created_time:\“2025-08-20T15:26:19.253871375+00:00\”}\”\n>”
-
success: false
-
This is the track.json sample:
{
“waypoints”: [
{
“aFromB”: {
“rotation”: {
“unitQuaternion”: {
“imag”: {
“z”: 0.7114984537903041
},
“real”: 0.7026876619480426
}
},
“translation”: {
“x”: 0.3000000009922852
}
},
“frameA”: “World”,
“frameB”: “Point_0”,
“tangentOfBInA”: {
“linearVelocity”: {},
“angularVelocity”: {}
}
},
{
“aFromB”: {
“rotation”: {
“unitQuaternion”: {
“imag”: {
“z”: 0.7114984548945247
},
“real”: 0.7026876608299765
}
},
“translation”: {
“x”: 0.296261971143784,
“y”: 0.2999767110567674
}
},
“frameA”: “World”,
“frameB”: “Point_2”,
“tangentOfBInA”: {
“linearVelocity”: {},
“angularVelocity”: {}
}
},
{
“aFromB”: {
“rotation”: {
“unitQuaternion”: {
“imag”: {
“z”: 0.7114984537903041
},
“real”: 0.7026876619480426
}
},
“translation”: {
“x”: 0.2925239403410424,
“y”: 0.5999534230213612
}
},
“frameA”: “World”,
“frameB”: “Point_3”,
“tangentOfBInA”: {
“linearVelocity”: {},
“angularVelocity”: {}
}
},
{
“aFromB”: {
“rotation”: {
“unitQuaternion”: {
“imag”: {
“z”: 0.7114984417933726
},
“real”: 0.7026876740953998
}
},
“translation”: {
“x”: 0.2887859104826728,
“y”: 0.8999301348700652
}
},
“frameA”: “World”,
“frameB”: “Point_4”,
“tangentOfBInA”: {
“linearVelocity”: {},
“angularVelocity”: {}
}
}