Hello, I was hoping to develop on the brain we received last week.
Our autoplot path recording and following didn’t seem to work, on the map, the robot just looks like it’s going forward and getting reset back to the centre after driving a bit. I’ve attached some photos and a video to better describe it. We had an internet connection, as well as a GPS signal connected to a base station. Is there anything else we are missing?
Based on the pictures you sent, I believe you’re having issues with the GPS, which is causing the filter to “Diverge.” I understand that the filter badge is showing that it is “converged,” but unfortunately, we found a bug recently related to the GPS, and I believe that this is what is causing the problem. We already have a fix for this issue, and we hope to release it to customers within the next few weeks.
To investigate this further, could you please open the GPS app, select the relposned tab, and verify that you have carrSoln = 1 or 2? If carrSoln isn’t showing on the screen, you’re not receiving RTK corrections. I am attaching two screenshots from our robots so you can compare them to yours: one with carrSoln and another without it (if carrSolon is different than 1 or 2, it simply won’t show).
Thank you for the update. It indeed seems like the robot is not properly connected to an RTK base station, which is crucial for precise location tracking and preventing the reset issue you’re experiencing. The fix I previously mentioned would improve the system’s ability to indicate connectivity status accurately but would not resolve an underlying connection problem.
Could you please confirm that you have access to an RTK base station other than farm-ng’s? Our base station operates at port number 50010 with the mountpoint RTK_Woven_Mob. If you’re attempting to use another RTK service, ensuring that the robot is configured with the correct port number and mountpoint for that service is essential.
Additionally, could you verify if you’re within the coverage area of your RTK base station? Sometimes, signal issues can arise due to environmental factors or being on the edge of the service area.
I am more than happy to assist further, including hopping on a support call if that would help you troubleshoot this issue more effectively. We understand the importance of getting everything running smoothly for your upcoming demo and are here to help you achieve that.
Looking forward to your response, let’s ensure we get your robot navigating accurately in time for your demo.
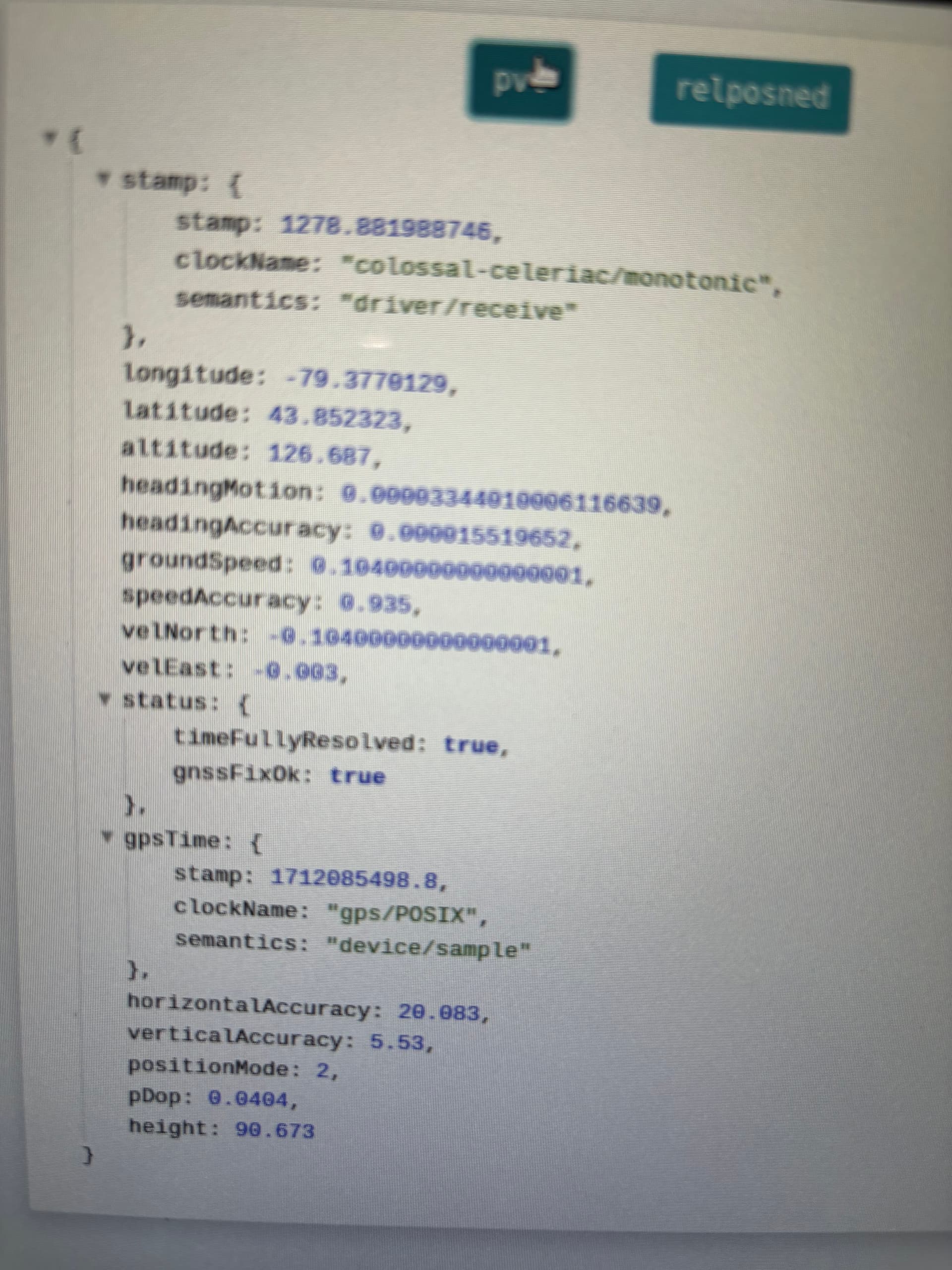
I’ll check with our provider for our base station, however it should be in range. Is there a way I can easily check for whether it’s properly connected? Something like a message I can look for that will let me know that it’s working properly? Also, I’m not sure if this will indicate that we are connected to an RTK base station, but here is the pvt message.
As of right now, the easiest way to check if the GPS is connected to an RTK base station is looking for the carr_soln field in the relposned messages. For the next release (scheduled for next week), there will be a “GPS” icon on the top bar that can be clickable and will show the GPS messages as well as inform if the GPS is connected to an RTK base station.
As for your current issue connecting with the base station, I am happy to schedule a support call to further investigate this issue.
Sounds good Gui, what time are you available for a call tomorrow? I’m available as early as 10:30 AM EST. Also, I’ve received some clarification on how we receive RTK corrections, we are connected to a VRS network, rather than a singular base station. Will that cause issues?
Will troubleshooting require the robot to see the sky, as well as freely move around? There are some circumstances we have for the next couple of days where we cannot bring it outside, and don’t have any room to move it, is that required to do troubleshoot?
If it is not required, could we do 2:30 PM EST tomorrow?
Thanks for letting me know your availability. Yes, troubleshooting will require the robot to see the sky and move around.
I am usually available M - F from 09:00 a.m. to 6:00 p.m. PST. Please let me know what time would work for you. I think we can move this conversation to email (support@farm-ng.com) to keep some details of the meeting private.
Hey all, thanks for the help earlier today in the call, I got in contact with the Can-Net guys, and it looks like the SIM card they are sending us is linked to the network, so it wouldn’t work without it. Would the best way to install the SIM card just be through the USB port, and a router that plugs in there? Something like this?
The connection will definitely need to be external, so this seems like a reasonable option. AFAIK, we have not seen anyone use an external sim card slot yet, so I cannot say for sure.
Let’s try this once you have it and we will be happy to support and debug on a call. I’d also like to confirm that booting the brain with this connected does not affect the port the GPS receiver connects to.
Please let us know the ETA for this and we can set up a time to test.
@kylecoble@Gui So it looks like regardless of the network, we should be able to access the network. They mentioned that maybe the GNSS receiver was not configured correctly? They did say that they saw a connection from Toronto, and that we were receiving corrections. They also asked if the GNSS receiver was set up to receive CMR+ corrections?
These are the updates, if we could get this working asap that would be great, thanks.
@kylecoble@Gui so I checked your datasheet for the message types, and I can see that it supports RTCM 3.3. Can-net lets me choose a specific mountpoint for message type, however I can only choose CMR+, CMRx, RTCM 3.1, or RTCM 3.2. Will RTCM 3.2 work with the receiver?
I’m glad you were able to get that information. We are not set up to handle CMR+ corrections with our software or the ublox module. This explains why we did not see any corrections coming in.
RTCM 3.x is designed to be backwards compatible, so RTCM 3.2 should work since we are setup to handle RTCM 3.3. Please give that a try!
P.S. Did they provide any guides or datasheets? If you do jump on another call with one of us in the near future, as much information and instruction you can get may prove helpful!
My team was able to get teach and repeat working! Seems it was as simple as a mismatch of the message type for the corrections. Thanks for all the support!